
Shuo Liu
I am a Ph. D candidate at Boston University Robotics Laboratory (since Sep. 2021) advised by Prof. Calin A. Belta. I received my Master’s degree in Mechanical Engineering from Columbia University advised by Prof. Richard W. Longman.
My research interest includes safety-critical control theory and trustworthy machine learning with applications to robotics and multi-agent systems. I welcome collaborations on related topics. If you are interested, please reach out by email.
Email: liushuo [at] bu (dot) edu [Google Scholar] / [Github] / [LinkedIn]
-
A global Control Lyapunov Function (CLF) is a scalar function used to design controllers that stabilize a nonlinear system globally (i.e., from any initial state) while a global Control Barrier Function (CBF) is a function used to ensure that a system's state remains within a safe set (e.g., avoids obstacles) for all time. CBFs are famous recently since they: 1. Ensure forward invariance of safe sets, guaranteeing system safety; 2. Allow real-time implementation via optimization-based controllers; 3. Can be combined with CLFs to balance safety and stability; 4. Work well for nonlinear and high-dimensional systems. 5. Provide a modular framework for handling multiple safety constraints.
My ambition is to ensure the safety of complex systems using CBFs, either through analytical methods or a combination of analytical and machine learning approaches, without being overly conservative. I aim to apply this to fields such as autonomous driving and robotics.
-
-
-
Research highlights
Recent News (last update: June. 2026)
- [07/2026] One paper is accepted in IEEE-CDC 2026.
- [06/2026] One paper is accepted in IEEE-IROS 2026.
- [05/2026] I presented recent work at Northeast Systems and Control Workshop (NESCW) 2026.
- [04/2026] One paper is accepted in IEEE-TVT 2026.
- [03/2026] One paper is accepted in IEEE-ECC 2026.
- [01/2026] One paper is accepted in IEEE-ACC 2026.
- [09/2025] One paper is accepted in IEEE-OJCSYS 2025.
- [07/2025] Two papers are accepted in IEEE-CDC 2025.
- [01/2025] One paper is accepted in IEEE-ACC 2025.
- [07/2024] Two papers are accepted in IEEE-CDC 2024.
- [07/2023] One paper is accepted in IEEE-CDC 2023.
- [05/2023] One paper is accepted in AAS/AIAA Astrodynamics Specialist Conference 2023.
- [01/2023] One paper is accepted in IEEE-ACC 2023.
Selected Journal Papers
* denotes equal contribution.
 |
RRT^η: Sampling-based Motion Planning and Control from STL Specifications using Arithmetic-Geometric Mean Robustness
Ahmad Ahmad, Shuo Liu, Roberto Tron, and Calin A. Belta submitted to IEEE Transactions on Robotics (T-RO) ArXiv, Bibtex |
 |
Feasibility-aware Learning of Robust Temporal Logic Controllers using BarrierNet
Wenliang Liu*, Shuo Liu*, Wei Xiao, and Calin A. Belta submitted to IEEE Transactions on Automatic Control (TAC) ArXiv, Bibtex |
| |
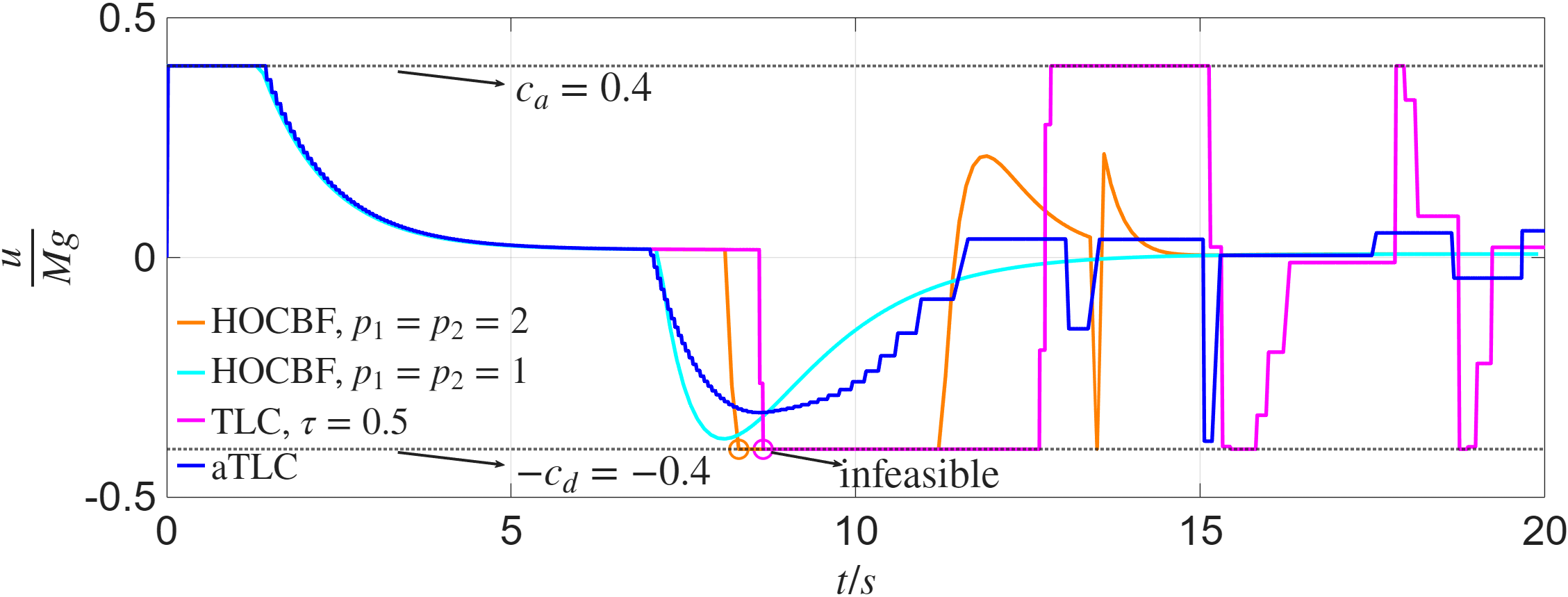
Auxiliary-Variable Adaptive Control Barrier Functions
Shuo Liu, Wei Xiao, and Calin A. Belta submitted to IEEE Transactions on Automatic Control (TAC) ArXiv, Bibtex |
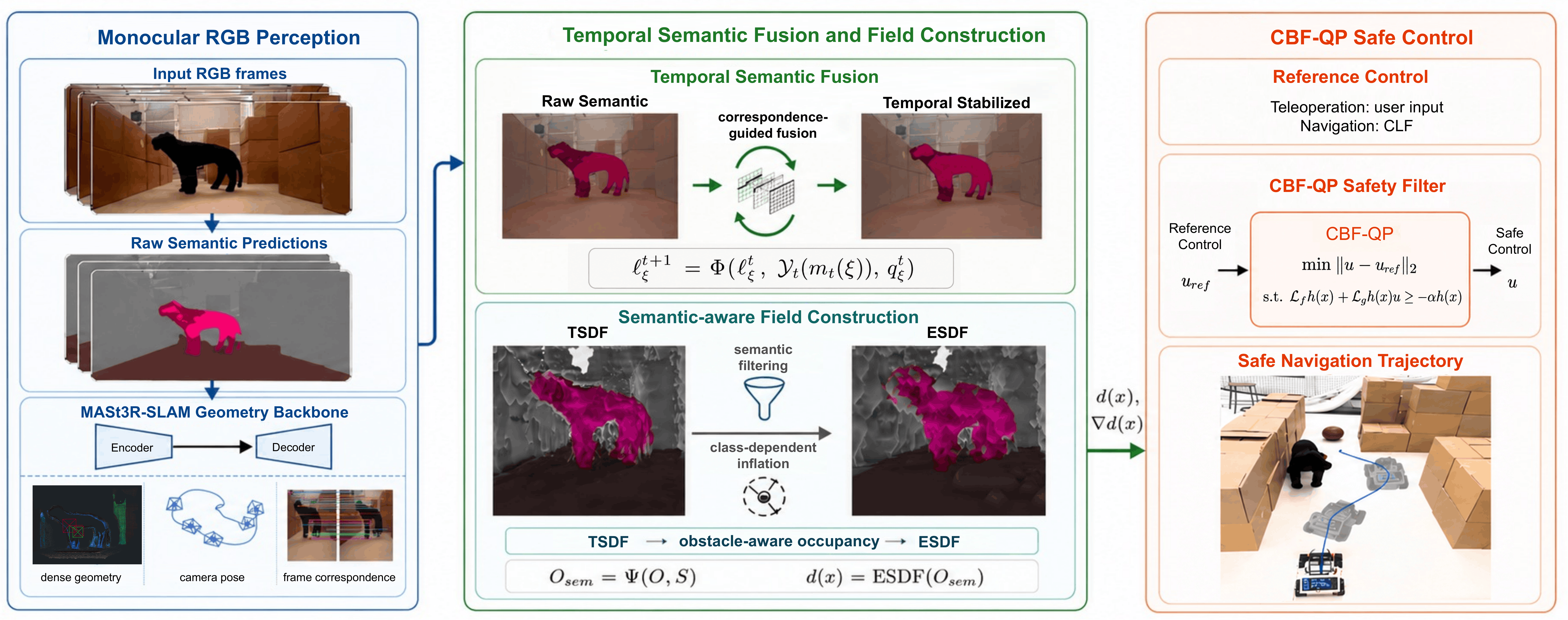 |
Embedding Semantic Risk into Distance Fields and CBFs for Online Monocular Safe Control
Dawei Zhang*, Nuo Chen*, Shuo Liu, Roberto Tron, and Zhiwen Fan submitted (under review) ArXiv, Website, Bibtex |
 |
Learning-Enabled Iterative Convex Optimization for Safety-Critical Model Predictive Control
Shuo Liu, Zhe Huang, Jun Zeng, Koushil Sreenath and Calin A. Belta IEEE Open Journal of Control Systems (OJ-CSYS), 2025 ArXiv, Publisher, Bibtex |
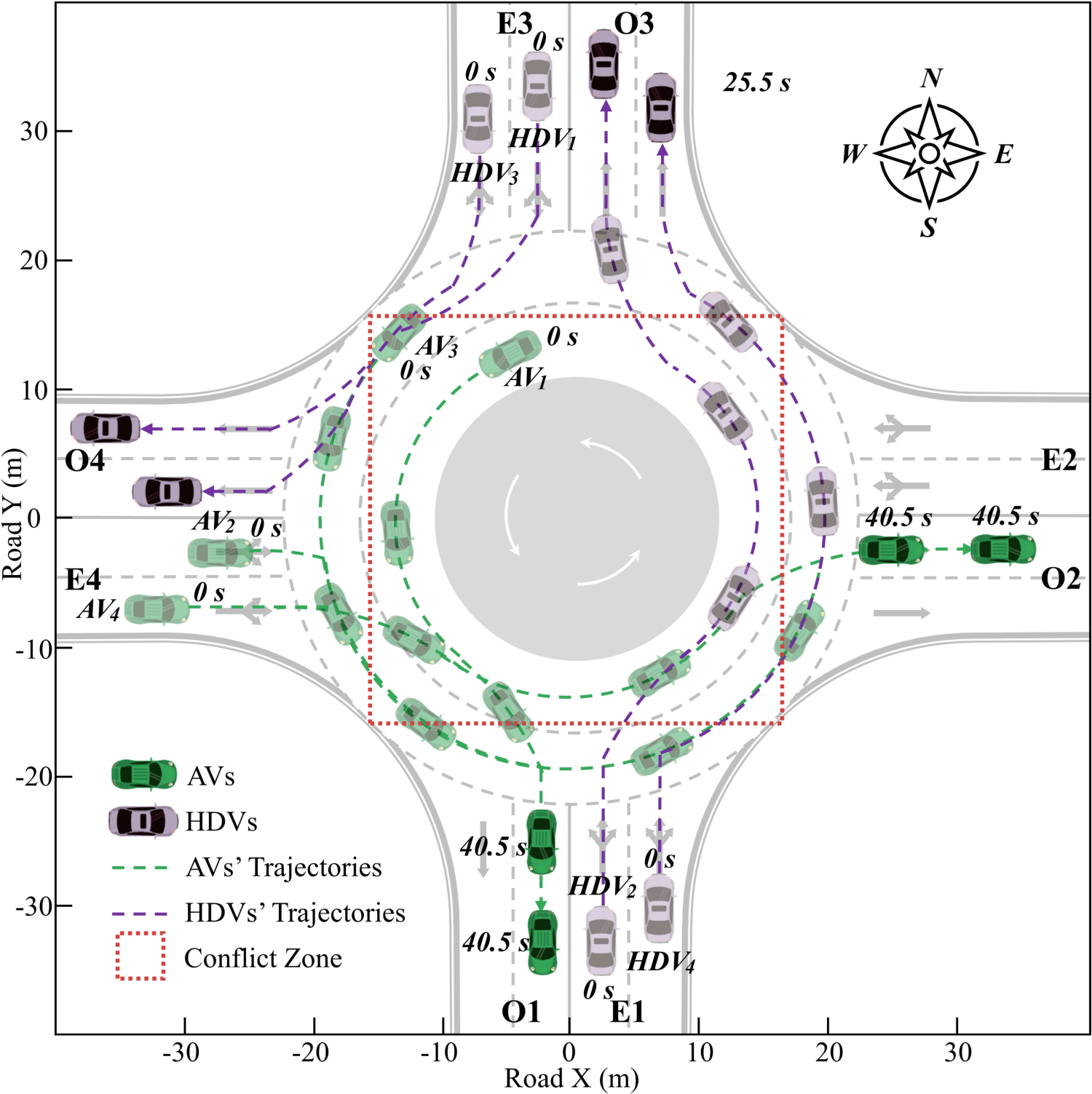 |
Hierarchical Multi-Agent MCTS for Safety-Critical Coordination in Mixed-Autonomy Roundabouts
Zhihao Lin, Jianglin Lan, Shuo Liu, Zhen Tian, Dezong Zhao, and Chongfeng Wei IEEE Transactions on Vehicular Technology (TVT), 2026 ArXiv, Publisher, Bibtex |
 |
A Predictive and Sampled-Data Barrier Method for Safe and Efficient Quadrotor Control
Ming Gao, Zhanglin Shangguan, Shuo Liu, Liang Wu, Bo Yang and Wei Xiao submitted to (Automatica) ArXiv, Bibtex |
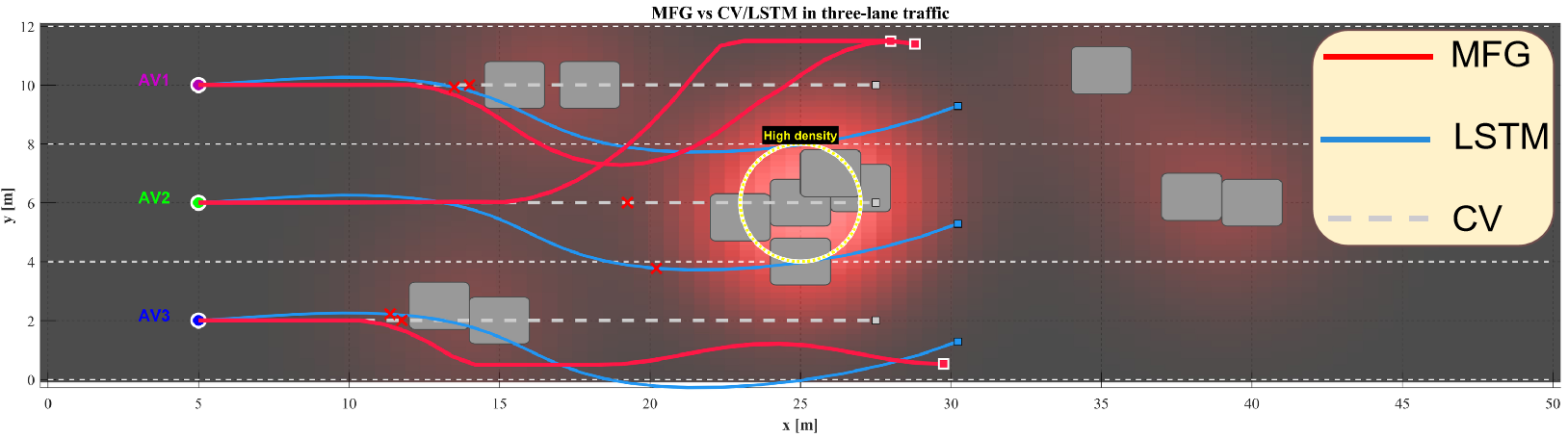 |
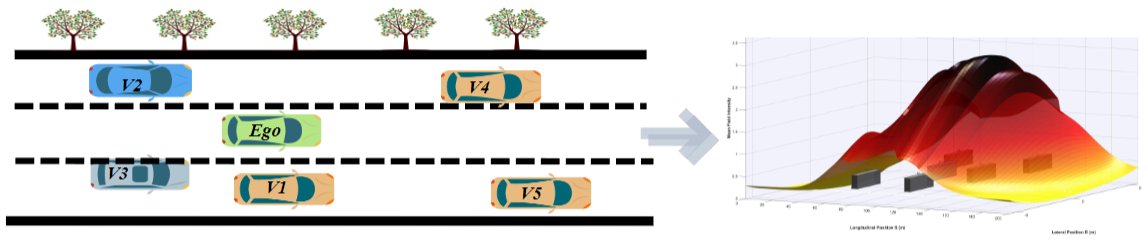
STR-MPC-AS: Mean-Field-Game-based Safe Planning for Middle-Risk and High-Risk Three-Lane Automated Highway Driving
Yangfan He, Yanhong Peng, Zhen Tian, Zhihao Lin, Dezong Zhao, Qi Zhang, Fujiang Yuan, Chunhong Yuan and Shuo Liu submitted to IEEE Transactions on Vehicular Technology (TVT) |
 |
Enhanced Mean Field Game for Interactive Decision-Making with Varied Stylish Multi-Vehicles
Liancheng Zheng, Zhen Tian, Yangfan He, Shuo Liu, Huilin Chen, Fujiang Yuan and Yanhong Peng submitted to IEEE Transactions on Reliability (TR) ArXiv, Bibtex |
Selected Conference Papers
 |
Event-Triggered Adaptive Taylor–Lagrange Control for Safety-Critical Systems
Shuo Liu, Wei Xiao, Christos G. Cassandras and Calin A. Belta submitted to IEEE American Control Conference (ACC), 2027 ArXiv, Bibtex |
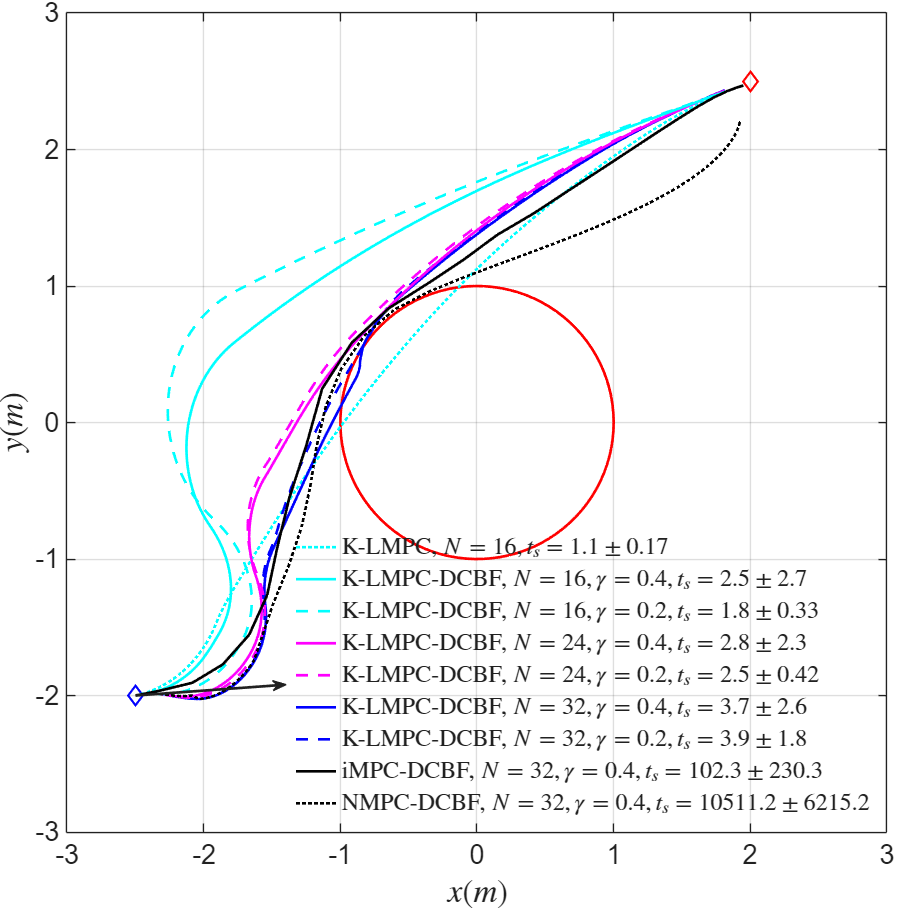 |
Koopman-Based Linear MPC for Safe Control using Control Barrier Functions
Shuo Liu*, Liang Wu*, Dawei Zhang, Ján Drgoňa and Calin A. Belta IEEE Conference on Decision and Control (CDC), 2026 ArXiv, Bibtex |
 |
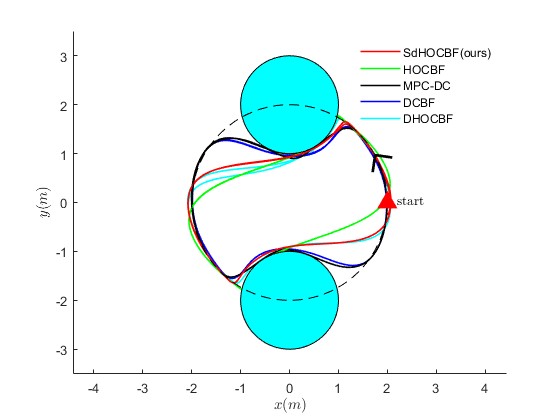
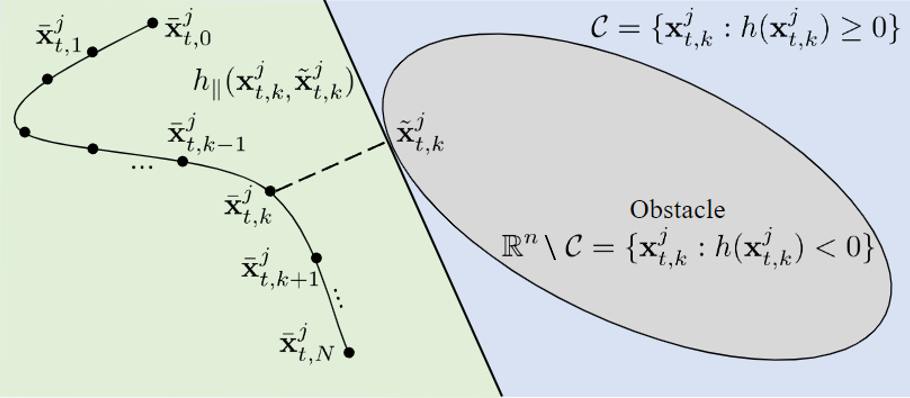
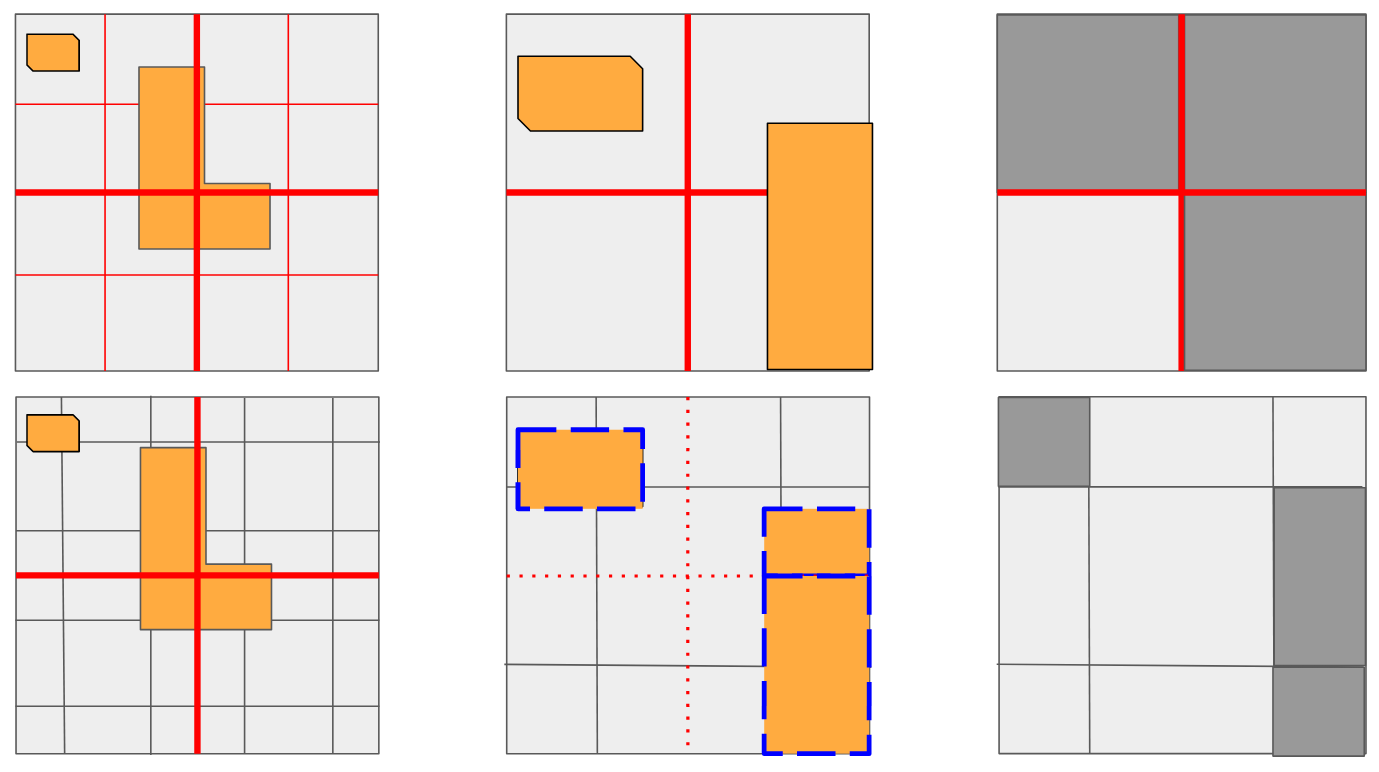
Iterative Convex Optimization with Control Barrier Functions for Obstacle Avoidance among Polytopes
Shuo Liu*, Zhe Huang* and Calin A. Belta IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026 ArXiv, Bibtex |
 |
Sampling-Aware Control Barrier Functions for Safety-Critical and Finite-Time Constrained Control
Shuo Liu, Wei Xiao and Calin A. Belta IEEE European Control Conference (ECC), 2026 ArXiv, Bibtex |
 |
Learning Safety for Obstacle Avoidance via Control Barrier Functions
Shuo Liu, Zhe Huang and Calin A. Belta submitted to IEEE American Control Conference (ACC), 2027 ArXiv, Bibtex |
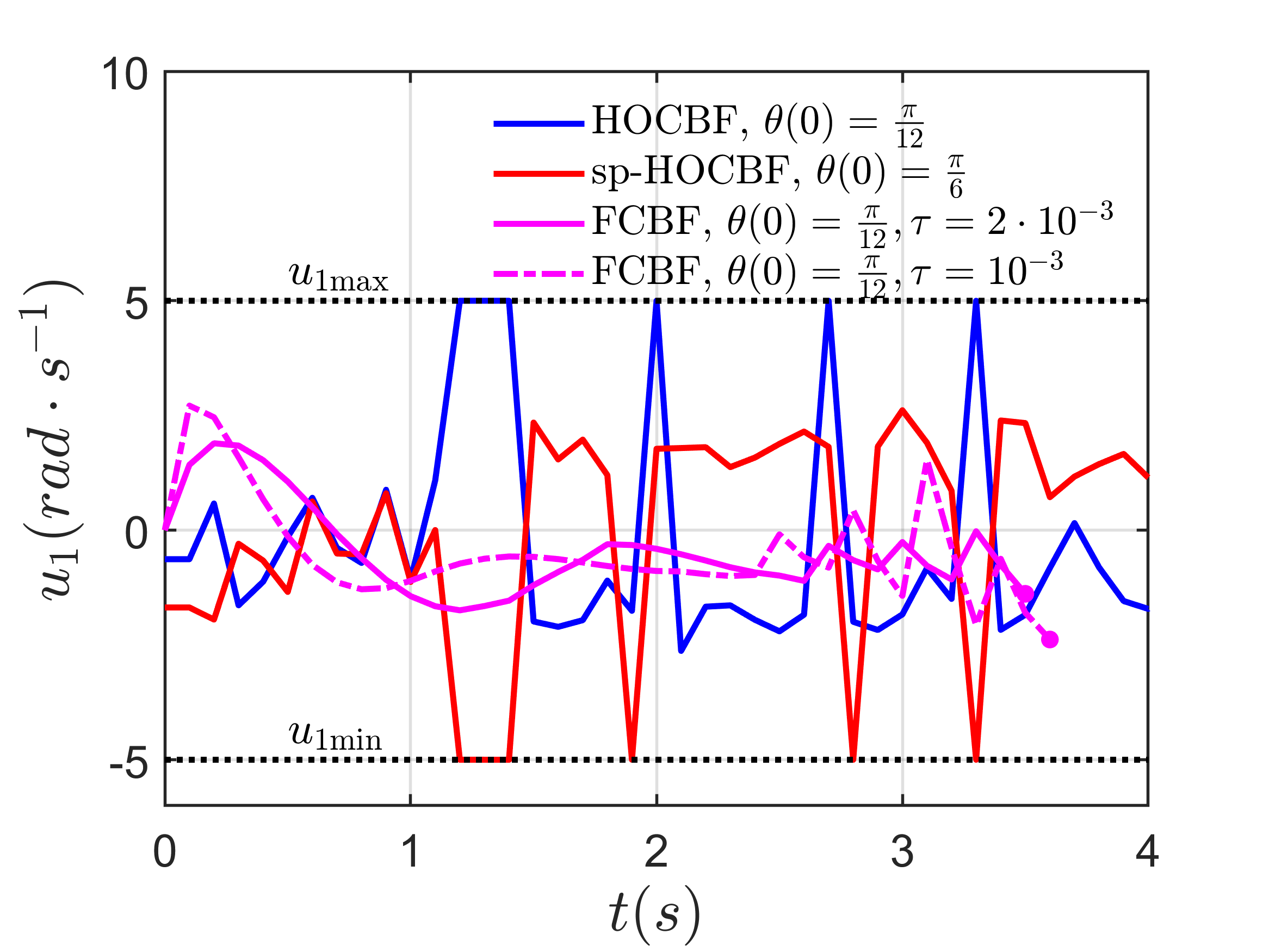 |
Safety-Critical Control with Guaranteed Lipschitz Continuity via Filtered Control Barrier Functions
Shuo Liu, Wei Xiao and Calin A. Belta IEEE American Control Conference (ACC), 2026 ArXiv, Bibtex |
 |
Control Barrier Functions via Minkowski Operations for Safe Navigation among Polytopic Sets
Yi-Hsuan Chen, Shuo Liu, Wei Xiao, Calin A. Belta and Michael Otte 64th IEEE Conference on Decision and Control (CDC), 2025 ArXiv, Publisher, Bibtex |
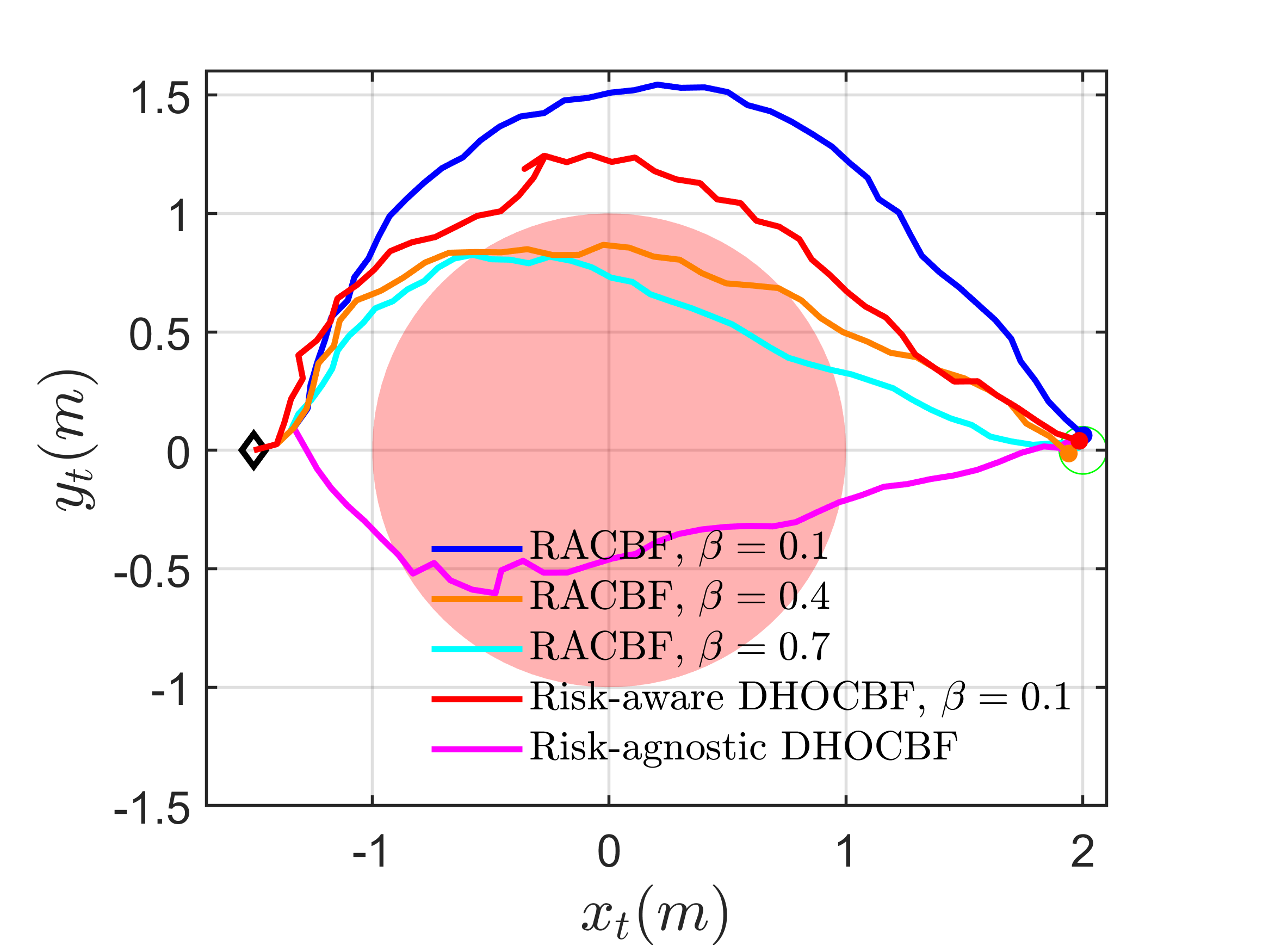 |
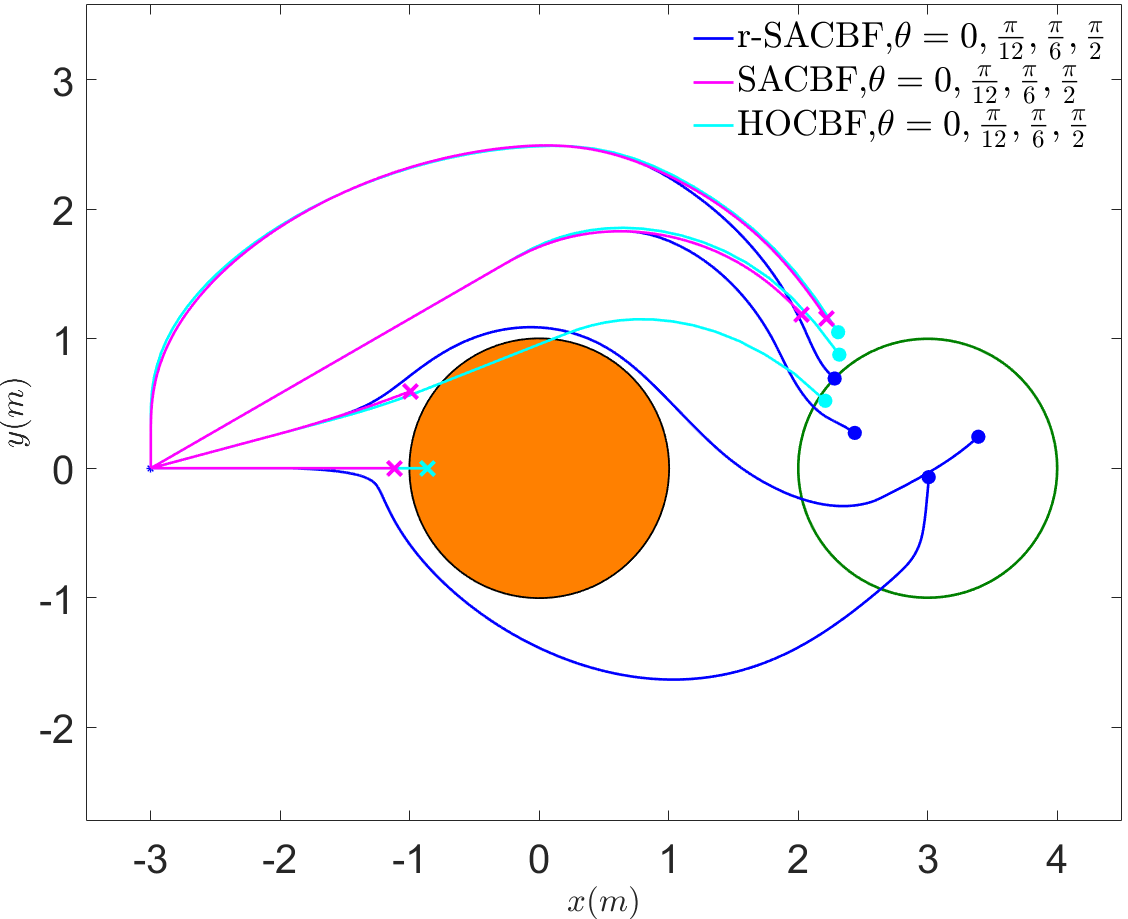
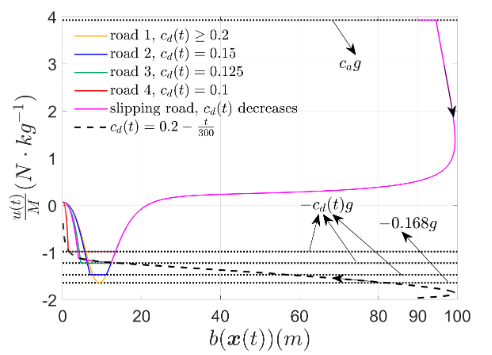
Risk-Aware Adaptive Control Barrier Functions for Safe Control of Nonlinear Systems under Stochastic Uncertainty
Shuo Liu and Calin A. Belta 64th IEEE Conference on Decision and Control (CDC), 2025 ArXiv, Publisher, Bibtex |
 |
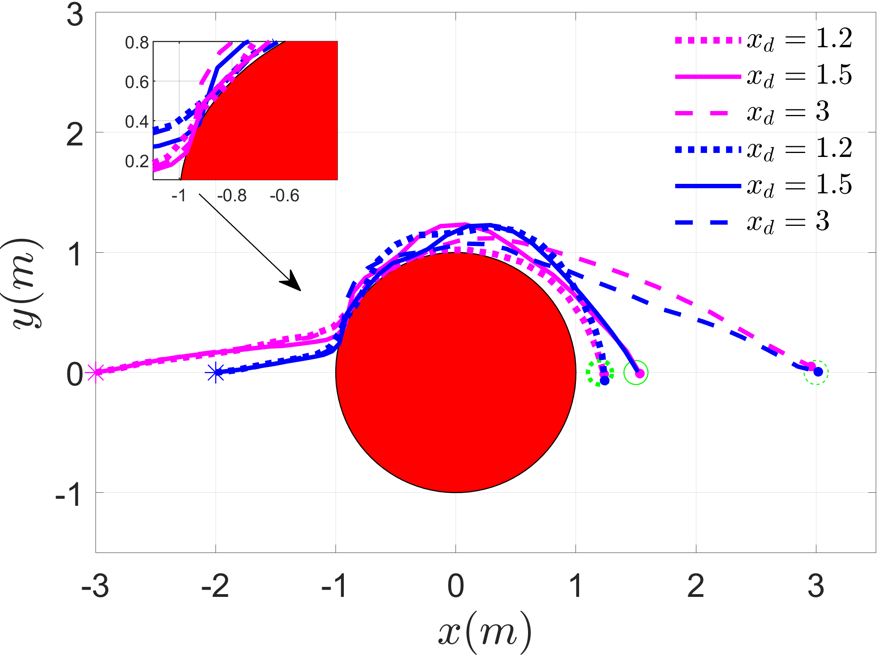
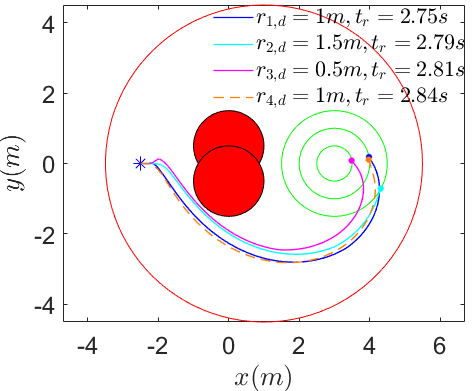
Safety-Critical Planning and Control for Dynamic Obstacle Avoidance Using Control Barrier Functions
Shuo Liu*, Yihui Mao* and Calin A. Belta IEEE American Control Conference (ACC), 2025 ArXiv, Publisher, Bibtex |
 |
Auxiliary-Variable Adaptive Control Lyapunov Barrier Functions for Spatio-Temporally Constrained Safety-Critical Applications
Shuo Liu, Wei Xiao and Calin A. Belta 63rd IEEE Conference on Decision and Control (CDC), 2024 ArXiv, Publisher, Bibtex |
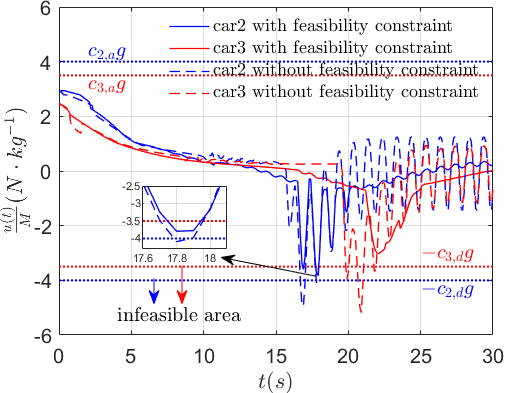 |
Feasibility-Guaranteed Safety-Critical Control with Applications to Heterogeneous Platoons
Shuo Liu, Wei Xiao and Calin A. Belta 63rd IEEE Conference on Decision and Control (CDC), 2024 ArXiv, Publisher, Bibtex |
 |
Auxiliary-Variable Adaptive Control Barrier Functions for Safety Critical Systems
Shuo Liu, Wei Xiao and Calin A. Belta 62nd IEEE Conference on Decision and Control (CDC), 2023 ArXiv, Publisher, Bibtex |
 |
Iterative Convex Optimization for Model Predictive Control with Discrete-Time High-Order Control Barrier Functions
Shuo Liu*, Jun Zeng*, Koushil Sreenath and Calin A. Belta IEEE American Control Conference (ACC), 2023 ArXiv, Publisher, Code, Bibtex |
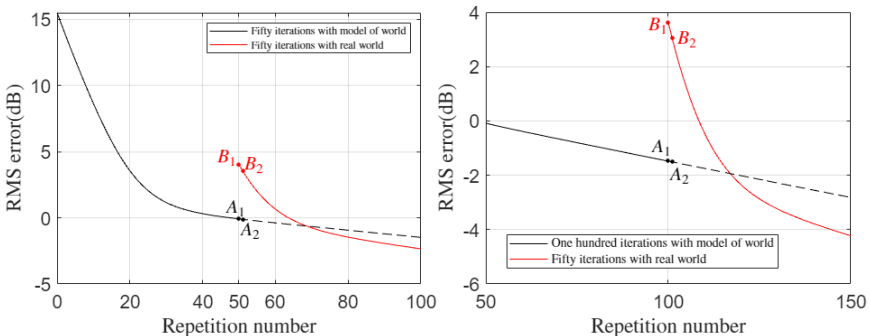 |
A Method to Speed Up Convergence of Iterative Learning Control for High Precision Repetitive Motions
Richard W. Longman, Shuo Liu and Tarek A. Elsharhawy AAS/AIAA Astrodynamics Specialist Conference, 2023 ArXiv, Publisher, Bibtex |
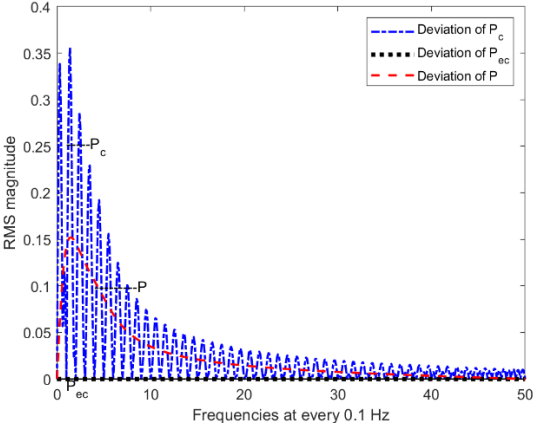 |
On Designing Finite Time Iterative Learning Control Based on Steady State Frequency Response
Shuo Liu, Richard W. Longman and Benjamas Panomruttanarug AAS/AIAA Astrodynamics Specialist Conference, 2021 ArXiv, Publisher, Bibtex |
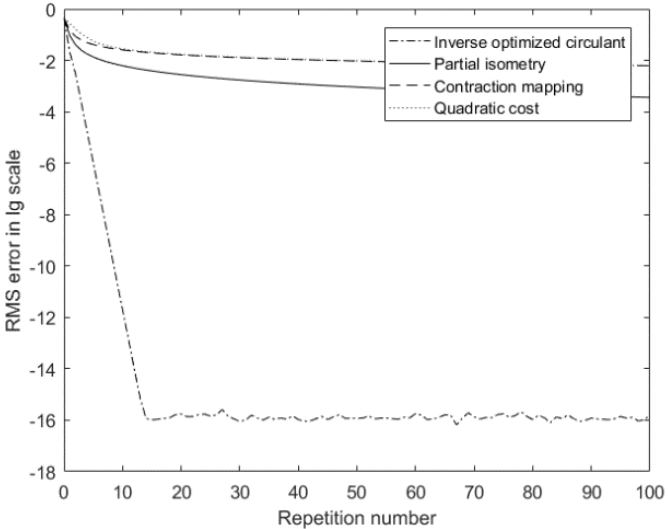 |
Modifying and Optimizing the Inverse of the Frequency Response Circulant Matrix as an Iterative Learning Control Compensator
Shuo Liu and Richard W. Longman 31st AAS/AIAA Space Flight Mechanics Meeting, 2021 ArXiv, Publisher, Bibtex |
Arxiv Papers
 |
A-OctoMap: An Adaptive OctoMap for Online Path Planning
Yihui Mao and Shuo Liu ArXiv Preprint, 2024 ArXiv, Bibtex |
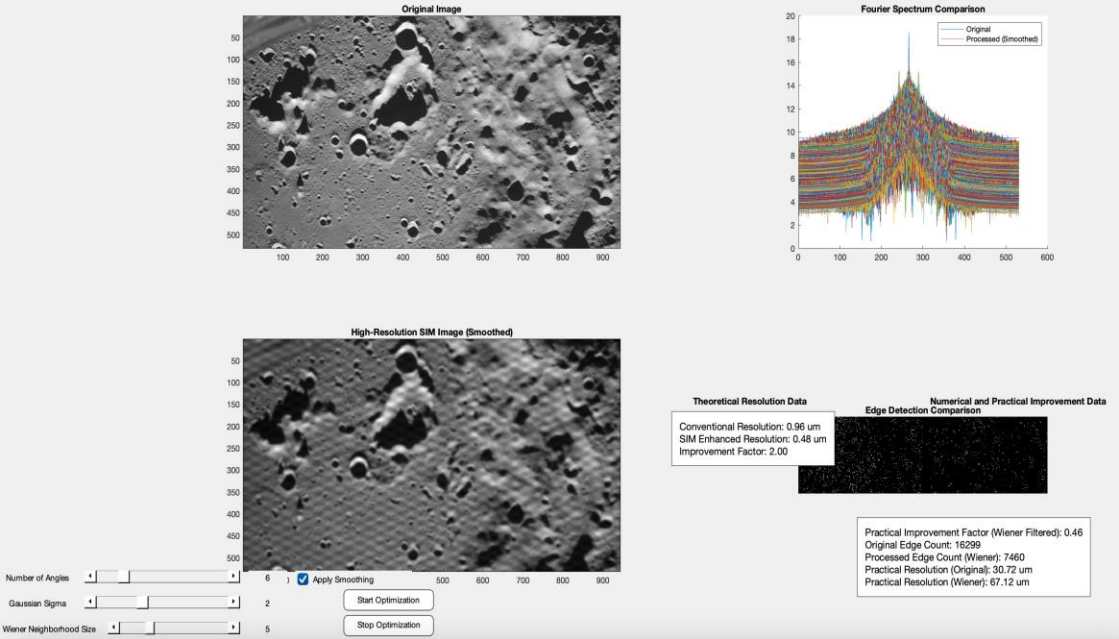 |
Mathematical Optimization of Resolution Improvement in Structured Light Data by Periodic Scanning Motion: Application for Feedback during Lunar Landing
Tarek A. Elsharhawy, P. James Schuck, Shuo Liu and Luc Saikali ArXiv Preprint, 2024 ArXiv, Bibtex |
-
 2021.09 - Present, Boston University
2021.09 - Present, Boston University
Ph.D. in Mechanical Engineering -
 2018.09 - 2020.02, Columbia University
2018.09 - 2020.02, Columbia University
M.Sc. in Mechanical Engineering -
 2014.09 - 2018.06, Chongqing University
2014.09 - 2018.06, Chongqing University
B.Eng. in Mechanical Engineering
Education
- Best Reviewer of PASE, 2024
- Boston University Ph.D. Distinguished Fellowship Award, 2021
- Outstanding Graduates in Chongqing University, 2018
- Meritorious Winners in Mathematical Contest In Modeling (MCM), 2016
- Second Prize in the Chinese Mathematics Competitions, 2016
Selected Honors
-
Reviewing
Journals: IEEE-TAC, IEEE-TCST, IEEE-TCYB, ACM-TODAES, ACM-TCPS, IJC, IJRNC, ARC, etc.
Conferences: IEEE-CCTA (2025), IEEE-IECON (2023), L4DC (2025), IEEE-CDC (2023-2025), IEEE-ACC (2024-2025), etc. -
Organization and Membership
Chair of Workshop on Artificial Intelligence-Based Safety Critical Optimal Control at ICAIM 2025, Qingdao, Shandong, China
Technical Committee of CVC (2026), IntelliSys (2025) and FTC (2025)
Professional Activity
-
Teaching Assistant
ENG EK103-Computational Linear Algebra, Boston University, Spring 2023
ENG EK381-Probability, Statistics, and Data Science for Engineers, Boston University, Fall 2022
EEMEE 6601-Intro to Control Theory, Columbia University, Fall 2019 -
Lectures
ENG ME734-Hybrid Systems: Theory, Computation, and Applications, Boston University, 04/20/2022